In the field of robot development used in areas into which human beings have difficulty
entering such as deep water, space and irradiated areas, the need for autonomous products that
can operate without being remotely control by a human being has increased. Considering
application to more general issues, it is important for autonomous operation to have the capability
to avoid unknown obstacles in three dimensional space. Accordingly, Mitsubishi Heavy Industries,
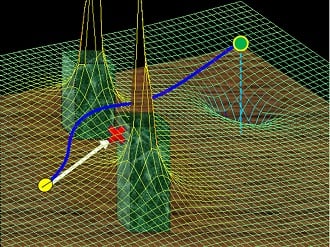
Ltd. (MHI) has used the potential method to establish control logic and verified the effectiveness of
the logic through simulation. Specifically, the capability to improve the efficiency of avoidance
operations in three dimensional space by finding obstacle avoidance paths in horizontal and
vertical directions based only on the coordinates of the obstacle was confirmed.