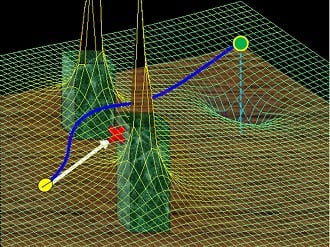
SHARE Vol. 51 No. 1 (2014) 新製品·新技術特集 技術論文ENGLISH ポテンシャル法によるロボット製品の障害物回避技術の開発Development of Obstacle Avoidance Control for Robot Products Using Potential Method 和文 (3.8MB) 英文 (4.5MB) 彌城祐亮Yusuke Yashiro 江口和樹Kazuki Eguchi 岩崎聡Satoshi Iwasaki 山内由章Yoshiaki Yamauchi 中田昌宏Masahiro Nakata 彌城祐亮 江口和樹 岩崎聡 山内由章 中田昌宏 深海·宇宙空間·放射線発生領域等,人間が進入することが困難な場所で活動が可能なロボット製品開発において,人間の遠隔操作無しで動作する自律製品が求められている。より一般的な問題への適用を考えると,自律動作には三次元空間での,未知の障害物を回避する機能が重要である。そこでポテンシャル法を用いて制御ロジックを構築し,その有効性をシミュレーションにより検証した。具体的には,水平方向,鉛直方向それぞれの障害物回避経路を,障害物座標のみから適切に導出し,三次元空間での回避動作を効率化できることを確認した。 三菱重工技報 Technical Review Vol. 63 No. 2 プラント・インフラドメイン特集 Vol. 63 No. 1 新製品·新技術特集 Vol. 62 No. 4 航空・防衛・宇宙特集 Vol. 62 No. 3 エナジードメイン特集 Vol. 62 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 62 No. 1 新製品·新技術特集 Vol. 61 No. 4 原子力特集 Vol. 61 No. 3 マテリアリティ特集 - 三菱重工グループが考える重要課題に対する取組み - Vol. 61 No. 2 プラント·インフラドメイン特集 Vol. 61 No. 1 新製品·新技術特集 Vol. 60 No. 4 サービス技術特集 Vol. 60 No. 3 エナジードメイン特集 Vol. 60 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 60 No. 1 新製品·新技術特集 Vol. 59 No. 4 カーボンニュートラル特集 Vol. 59 No. 3 デジタルイノベーション特集 Vol. 59 No. 2 プラント·インフラ特集 Vol. 59 No. 1 新製品·新技術特集 Vol. 58 No. 4 航空宇宙特集 Vol. 58 No. 3 三菱パワー特集 Vol. 58 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 58 No. 1 新製品·新技術特集 Vol. 57 No. 4 原子力特集 Vol. 57 No. 3 工作機械特集 Vol. 57 No. 2 インダストリー&社会基盤特集 Vol. 57 No. 1 新製品·新技術特集 Vol. 56 No. 4 冷熱特集 Vol. 56 No. 3 三菱日立パワーシステムズ特集 Vol. 56 No. 2 M-FET特集 Vol. 56 No. 1 新製品·新技術特集 Vol. 55 No. 4 パワードメイン 新事業特集 Vol. 55 No. 3 インダストリー&社会基盤ドメイン特集 Vol. 55 No. 2 新技術特集 Vol. 55 No. 1 環境特集 Vol. 54 No. 4 航空宇宙特集 Vol. 54 No. 3 三菱日立パワーシステムズ特集 Vol. 54 No. 2 冷熱特集 Vol. 54 No. 1 M-FET特集