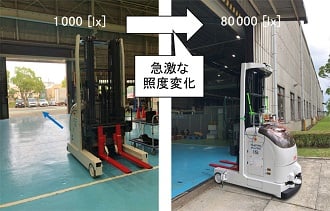
For guiding industrial AGVs (Automatic Guided Vehicle), robust self-localization method is indispensable. Visual SLAM (Visual Simultaneous Localization And Mapping, hereafter V-SLAM) using a camera is one of the self-localization methods that can be used indoors and does not depend on artificial landmarks. However, in a semi-outdoor environment affected by sunlight, since the lighting conditions fluctuate rapidly, the self-localization methods process using V-SLAM may become unstable. Therefore, Mitsubishi Heavy Industries, Ltd. (MHI) has developed a robust and accurate self-localization method for operation under varying lightning conditions, by combining 2D LiDAR, standard equipment of many industrial AGVs, with V-SLAM, and also integrating internal sensors using extended Kalman filter.