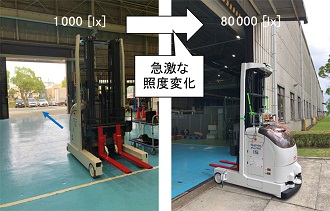
SHARE Vol. 58 No. 1 (2021) 新製品·新技術特集 技術論文ENGLISH 照明条件変動にロバストな高精度自己位置推定技術Robust and High-Precision Self-Localization Estimation Technology under Varying Lighting Conditions 和文 (1.3MB) 英文 (1.2MB) 北島克将Katsumasa Kitajima 木内裕介Yusuke Kinouchi 杉本喜一Kiichi Sugimoto 北島克将 木内裕介 杉本喜一 産業用無人ビークルの誘導では環境変化に対してロバストな自己位置推定技術が必須である。屋内で利用可能であり,人工ランドマークに依存しない自己位置推定技術として,カメラを用いるVisual SLAM(Visual Simultaneous Localization And Mapping,以下V-SLAM)があるが,日照の影響を受ける半屋外環境では照明条件が急激に変動し,自己位置推定処理が不安定化する恐れがある。そこで当社では,多くの産業用無人ビークルで既設の2D LiDARとV-SLAMを併用し,更に拡張カルマンフィルタによる内界センサとの融合を行うことによって,照明条件変動にロバストな高精度自己位置推定技術を開発した。 三菱重工技報 Technical Review Vol. 63 No. 3 デジタル特集 Vol. 63 No. 2 プラント・インフラドメイン特集 Vol. 63 No. 1 新製品·新技術特集 Vol. 62 No. 4 航空・防衛・宇宙特集 Vol. 62 No. 3 エナジードメイン特集 Vol. 62 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 62 No. 1 新製品·新技術特集 Vol. 61 No. 4 原子力特集 Vol. 61 No. 3 マテリアリティ特集 - 三菱重工グループが考える重要課題に対する取組み - Vol. 61 No. 2 プラント·インフラドメイン特集 Vol. 61 No. 1 新製品·新技術特集 Vol. 60 No. 4 サービス技術特集 Vol. 60 No. 3 エナジードメイン特集 Vol. 60 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 60 No. 1 新製品·新技術特集 Vol. 59 No. 4 カーボンニュートラル特集 Vol. 59 No. 3 デジタルイノベーション特集 Vol. 59 No. 2 プラント·インフラ特集 Vol. 59 No. 1 新製品·新技術特集 Vol. 58 No. 4 航空宇宙特集 Vol. 58 No. 3 三菱パワー特集 Vol. 58 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 58 No. 1 新製品·新技術特集 Vol. 57 No. 4 原子力特集 Vol. 57 No. 3 工作機械特集 Vol. 57 No. 2 インダストリー&社会基盤特集 Vol. 57 No. 1 新製品·新技術特集 Vol. 56 No. 4 冷熱特集 Vol. 56 No. 3 三菱日立パワーシステムズ特集 Vol. 56 No. 2 M-FET特集 Vol. 56 No. 1 新製品·新技術特集 Vol. 55 No. 4 パワードメイン 新事業特集 Vol. 55 No. 3 インダストリー&社会基盤ドメイン特集 Vol. 55 No. 2 新技術特集 Vol. 55 No. 1 環境特集 Vol. 54 No. 4 航空宇宙特集 Vol. 54 No. 3 三菱日立パワーシステムズ特集 Vol. 54 No. 2 冷熱特集 Vol. 54 No. 1 M-FET特集