




制御・センサ情報処理
SHARE




主要技術
1.航空機、水中探査機、無人船などを対象とした運動制御(自律化・知能化)技術
2.発電プラント、化学プラントなどを対象としたプロセス制御技術
3.深層ニューラルネットワークなど最新の画像・信号処理を適用した対象物の検知・認識技術
4.移動体自律制御のための周囲環境認識技術
5.プラント系統最適化・プラント運転最適化・移動体経路計画などの大規模最適化技術
6.モデリング・シミュレーション技術

自律型洋上中継機「Kaikoo」
機雷探知機「OZZ-5」
周囲環境認識
開発事例
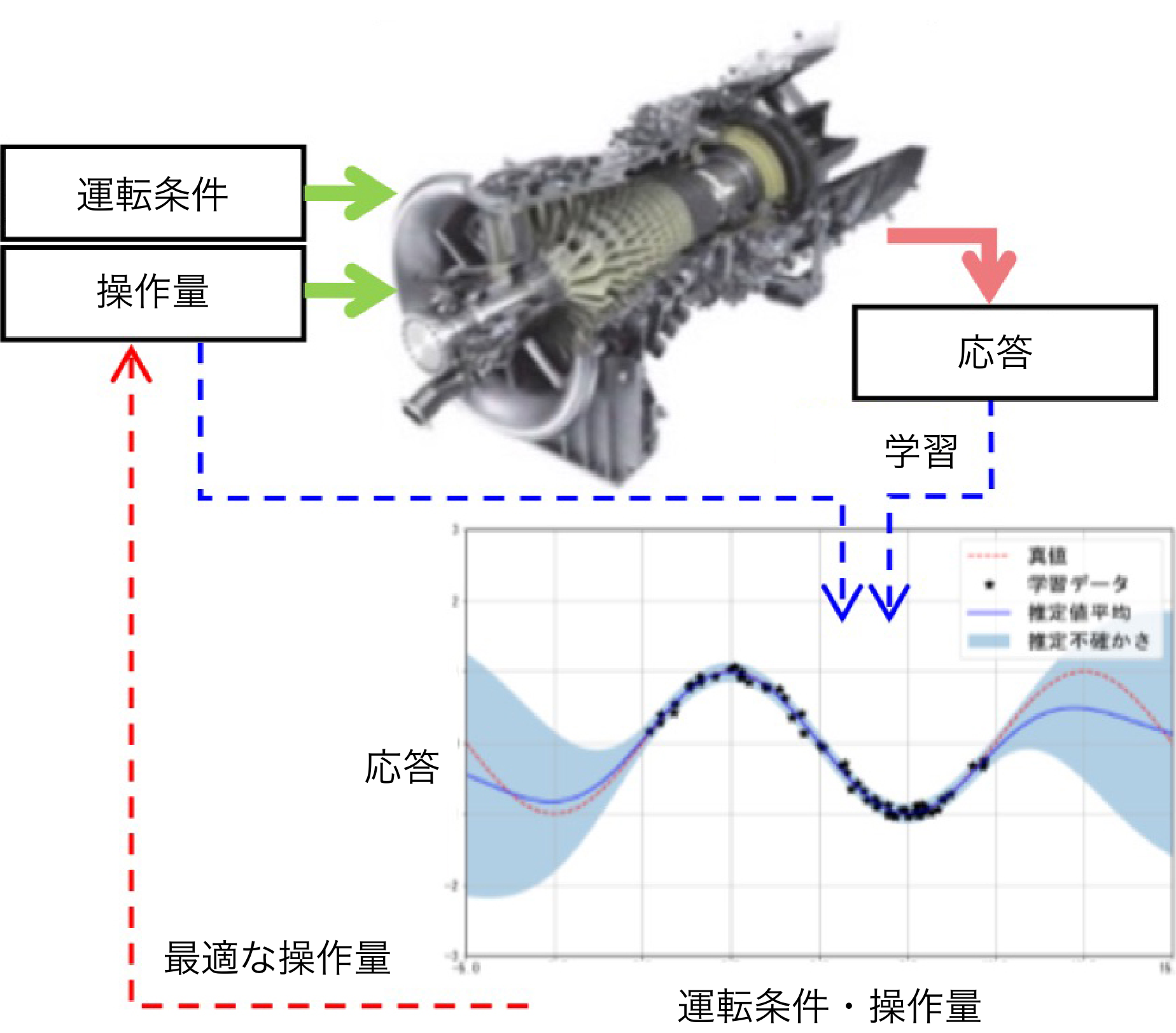
1.機械学習を用いたガスタービン最適制御
発電用ガスタービンには、燃焼振動のように設計段階で事前に正確な予測が困難な特性や、効率等の経時的に変化する特性が存在します。一方で、高い稼働率と信頼性、高効率な運転を実現するには、これら予測困難な特性に対応した高度な制御が必要とされます。
その実現手段として機械学習を応用した制御手法の開発を行っています。具体的には、推定の不確かさを算出することができるガウス過程回帰を応用し、①燃焼振動を防止するための燃料系統への燃料配分制御、および、②高温燃焼ガスからロータを確実に保護する効率を最大化するためのタービン冷却空気制御を実用化しました。
2.フォークリフト向け人検知システム
フォークリフトによる事故は重大災害に繋がりやすいため、安全確保のために確実な周囲確認が必要です。しかし、運転席からはマストやカウンターウェイトなどが視界を遮り、多くの死角が発生してしまいます。死角を補うためにミラーやカメラを設置した場合でも、運転者が常にそれらを注視することは容易ではありません。
そこで、運転者の周囲確認を支援するため、車両周辺を監視するように配置されたカメラの映像から、深層学習を用いてリアルタイムに人を自動検出する技術を開発しました。また、車載用GPUに実装して運転者に警告する試作システムを開発しました。


3.AUV(無人潜水艇)の制御システム開発
当社は、これまでに“うらしま”“じんべい”“ゆめいるか”などの海底資源探査用AUVを納入しています。これまで海底により近づいた低高度、かつ低速度帯域における詳細な探査をするオペレーションは、有人潜水艇HOVや遠隔操作型無人潜水機ROVが担っていましたが、付帯設備が大規模で操作にも熟練を要する問題があるため、AUVを低速・低高度で運用するニーズが高まっており、AUVの低速・低高度運用を実現するための自律制御技術を開発しました。

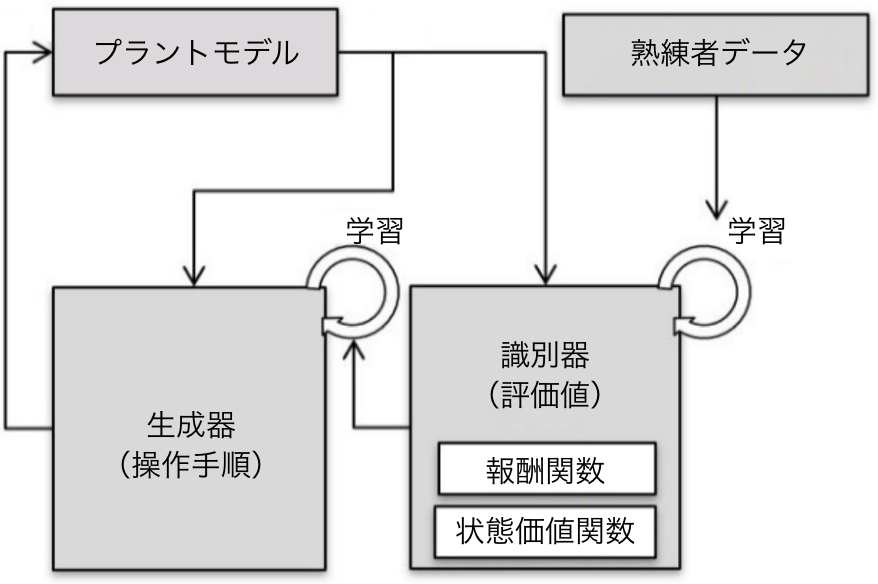
4.熟練者の操作習得とノウハウ可視化に寄与する逆強化学習
プラントの非定常手動操作は、運転状態に応じた適切な判断が求められ、運転員の知見や技量に大きく依存しています。
熟練者の操作データを学習することで熟練者操作を自動化でき、熟練者の操作方針(ノウハウ)を推量できる逆強化学習に着目しました。その中でも、従来の逆強化学習に比べて、より複雑な操作を習得できるとされ、深層学習技術である敵対的生成ネットワークを取り入れた逆強化学習手法を応用することで、熟練者のプラント操作手順を学習し、操作方針を推量できる技術を開発しました。
また、熟練パイロットによる航空機操縦の学習にも本技術を適用し、運転訓練に応用する取り組みを実施中です。

5.鉄道システム・シミュレータ
近年、地球規模での環境問題が注目されている中、環境にやさしい交通システムに関心が集まっています。当社では、ゴムタイヤ式の新交通システムであるAGT(Automated Guideway Transit)や、鉄輪式のLRT(Light Rail Transit)など、安全・快適な陸上輸送システムを提供しています。このような鉄道システムは、お客様の路線ごとに、軌道形状・運行条件・編成数・電力システム・信号システムなどの条件が異なるため、お客様のご要望に即座に対応し、輸送量を確保しかつ最適なシステム構成を対案するためには、事前の精緻なシミュレーション検討が不可欠です。
以上の背景のもと鉄道システムの設計効率化のための統合シミュレータを開発しました。

-
電化・知能化の他の技術