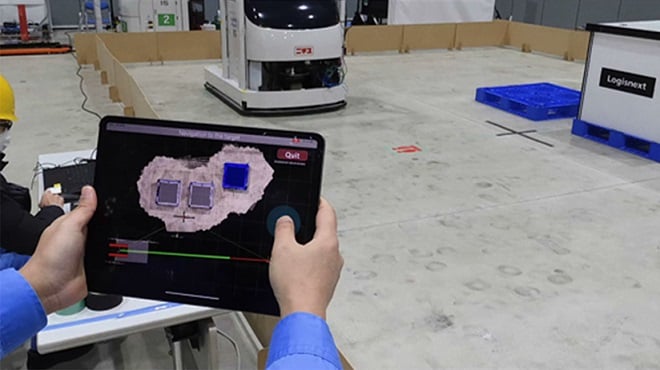
SHARE Vol. 59 No. 3 (2022) デジタルイノベーション特集 技術論文ENGLISH 人-機械協調による無人車両の精密ナビゲーション技術Highly Accurate Navigation Technology for Unmanned Vehicles through Human-Machine Cooperation 和文 (2.4MB) 英文 (2.2MB) 木内裕介Yusuke Kinouchi 北島克将Katsumasa Kitajima 亀尾成寿Naruhisa Kameo 杉本喜一Kiichi Sugimoto 田崎勇一Yuichi Tazaki 横小路泰義Yasuyoshi Yokokohji 木内裕介 北島克将 亀尾成寿 杉本喜一 田崎勇一 横小路泰義 無人フォークリフト(AGF:Automated Guided Forklift)やプラント巡回点検ロボット等の当社無人車両製品のフレキシビリティを向上させ,更なる現場適用を進めていくためには,任意の場所に配置された物体に対して無人車両を精密誘導するためのナビゲーション技術が必要となる。そこで当社は,作業者が携帯するタブレット端末と無人車両センサで対象物体を協調的に測位し,その測位情報に基づき無人車両を精密誘導する人-機械協調型の精密ナビゲーション技術を神戸大学と共同で開発した。本技術を活用し,当社グループ事業のモビリティ領域の知能化·高度化に貢献していく予定である。 三菱重工技報 Technical Review Vol. 63 No. 3 デジタル特集 Vol. 63 No. 2 プラント・インフラドメイン特集 Vol. 63 No. 1 新製品·新技術特集 Vol. 62 No. 4 航空・防衛・宇宙特集 Vol. 62 No. 3 エナジードメイン特集 Vol. 62 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 62 No. 1 新製品·新技術特集 Vol. 61 No. 4 原子力特集 Vol. 61 No. 3 マテリアリティ特集 - 三菱重工グループが考える重要課題に対する取組み - Vol. 61 No. 2 プラント·インフラドメイン特集 Vol. 61 No. 1 新製品·新技術特集 Vol. 60 No. 4 サービス技術特集 Vol. 60 No. 3 エナジードメイン特集 Vol. 60 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 60 No. 1 新製品·新技術特集 Vol. 59 No. 4 カーボンニュートラル特集 Vol. 59 No. 3 デジタルイノベーション特集 Vol. 59 No. 2 プラント·インフラ特集 Vol. 59 No. 1 新製品·新技術特集 Vol. 58 No. 4 航空宇宙特集 Vol. 58 No. 3 三菱パワー特集 Vol. 58 No. 2 物流·冷熱·ドライブシステムドメイン特集 Vol. 58 No. 1 新製品·新技術特集 Vol. 57 No. 4 原子力特集 Vol. 57 No. 3 工作機械特集 Vol. 57 No. 2 インダストリー&社会基盤特集 Vol. 57 No. 1 新製品·新技術特集 Vol. 56 No. 4 冷熱特集 Vol. 56 No. 3 三菱日立パワーシステムズ特集 Vol. 56 No. 2 M-FET特集 Vol. 56 No. 1 新製品·新技術特集 Vol. 55 No. 4 パワードメイン 新事業特集 Vol. 55 No. 3 インダストリー&社会基盤ドメイン特集 Vol. 55 No. 2 新技術特集 Vol. 55 No. 1 環境特集 Vol. 54 No. 4 航空宇宙特集 Vol. 54 No. 3 三菱日立パワーシステムズ特集 Vol. 54 No. 2 冷熱特集 Vol. 54 No. 1 M-FET特集